舰艇相对运动原理
principle of ship relative movement
jianting xiangdui yundong yuanli
舰艇相对运动原理
两舰定向定速运动中,机动舰以相对速度沿相对航向线对目标舰作相对运动的规律。即将两舰各自以定向定速对地运动的位置变化,转化为一舰对另一舰相对运动的位置变化。是解算对海上活动目标机动命题的理论基础。通常,以目标舰作为参照系,研究机动舰对目标舰的运动规律。解算命题过程中,是运用舰艇相对运动原理,通过解算速度三角形、航程三角形、阵位三角形求有关要素。
在理论力学中,将质点对活动坐标系的运动称为相对运动;而活动坐标系本身的运动称为牵连运动。则同一质点对固定坐标系的运动称绝对运动。由运动学可知,绝对运动的速度矢量等于相对运动的速度矢量与牵连运动的速度矢量的几何和(图1)。目标舰作为活动坐标系原点,其对地的运动为牵连运动,机动舰对地的运动为绝对运动,对目标舰的运动为相对运动。速度矢量表达式为:

式中: 为机动舰速度矢量
为机动舰速度矢量
 为目标舰速度矢量
为目标舰速度矢量
Vxw为机动舰对目标舰(作为参照系)的相对速度矢量。
运用舰艇相对运动原理解算舰艇机动问题可分3类:①已知机动舰航向Cw、航速VW,目标舰航向CM、航速VM,求机动舰相对航向CxW、相对航速Vxw。用于分析计算双方阵位要素(方位、舷角、距离)及其变化规律。②已知机动舰航速,相对航向,目标舰航向、航速,求机动舰航向和相对航速。用于占领阵位、接近、展开、规避、侦察、搜索及施放烟幕等机动。③已知机动舰航向、航速,相对航向,相对航速,求目标舰航向和航速。用于测定目标舰航向航速。

图1 舰艇相对运动原理图
由机动舰速度矢量、目标舰速度矢量和相对速度矢量为三边所构成的三角形称为速度三角形△MOAB(图2)。包括机动舰航向、航速,目标舰航向、航速,相对航向和相对航速6个要素。已知其中任意4个要素,便可用图解法或解析法求得另外两个要素。图解法分为:①直接作图法。由任意一点M0开始,标绘机动舰速度矢量 和目标舰速度矢量
和目标舰速度矢量 ,自
,自 的末端B向
的末端B向 末端A作一矢量,即为相对速度矢量
末端A作一矢量,即为相对速度矢量 。②反向作图法。作矢量
。②反向作图法。作矢量 和
和 ,使其末端交汇于一点C,自
,使其末端交汇于一点C,自 的始端向
的始端向 的始端作一矢量,即为相对速度矢量
的始端作一矢量,即为相对速度矢量 。两种作图法都符合速度矢量表达式
。两种作图法都符合速度矢量表达式 。解析法:计算公式为:
。解析法:计算公式为:
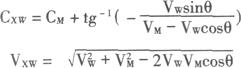
式中:θ为机动舰与目标舰的航向差,以目标舰航向线为基准0°,向左向右各由0°~180°,向右计算为“+”,向左计算为“-”。
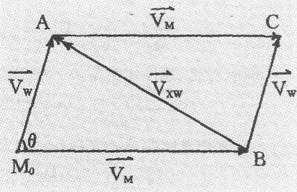
图2 速度三角形图
由机动舰航程、目标舰航程和机动舰相对航程为三边所构成的三角形为航程三角形,如图1中△W0W1W′1。它与速度三角形对应相似。用于求机动舰、目标舰任意时刻的实际位置。
由机动舰、目标舰的初始位置及机动舰某时刻的相对阵位为顶点所构成的三角形称为阵位三角形,如图1中△W0M0W′1。用于分析任意时刻阵位要素的变化规律。